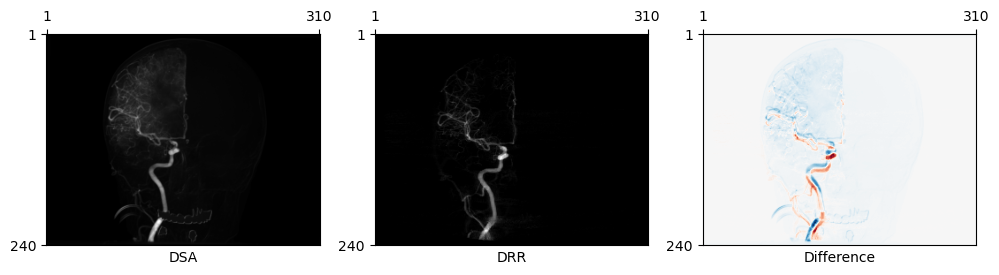
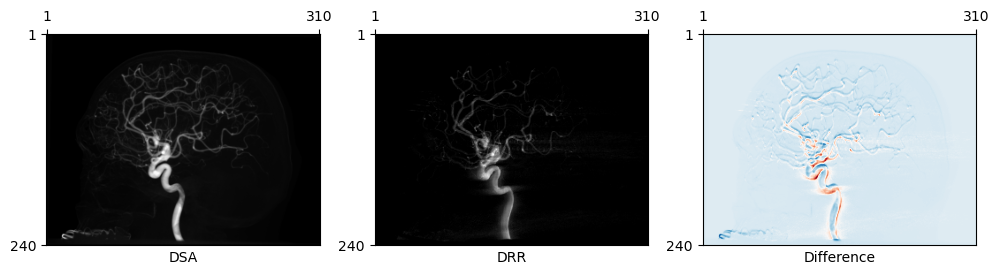
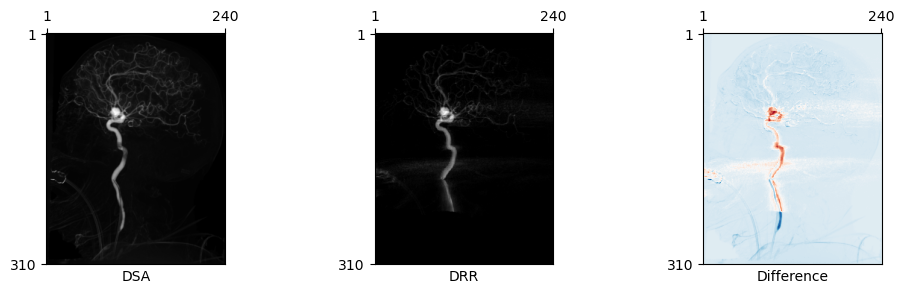
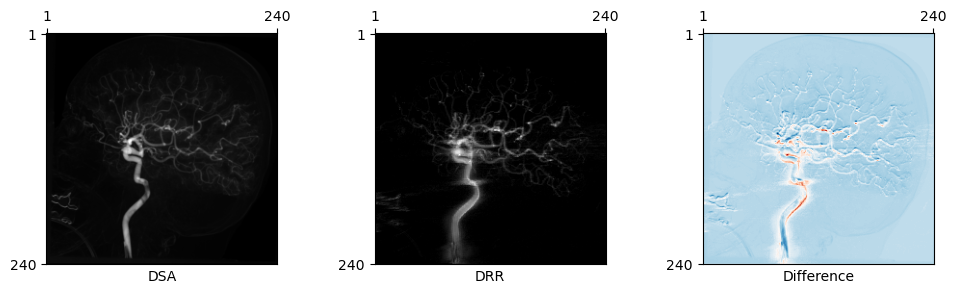
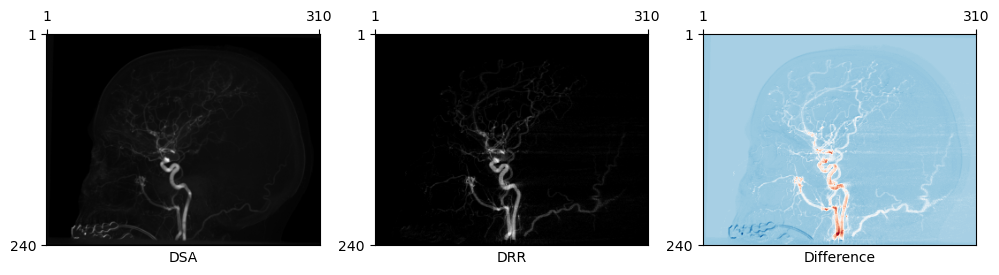
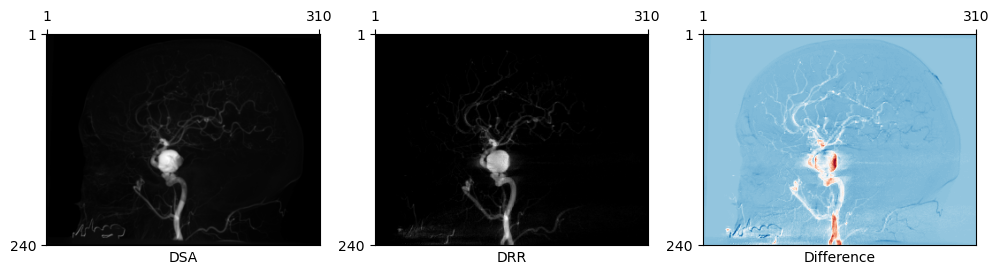
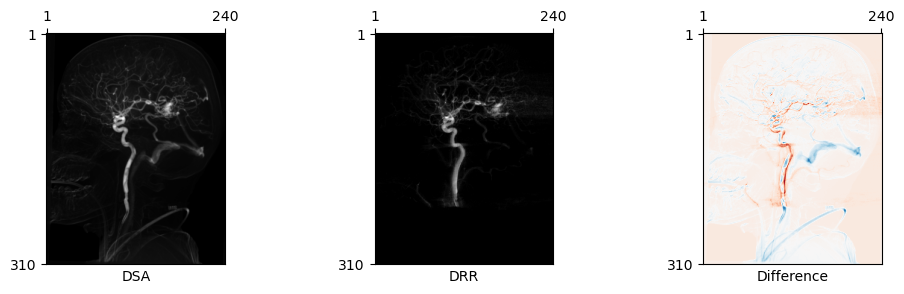
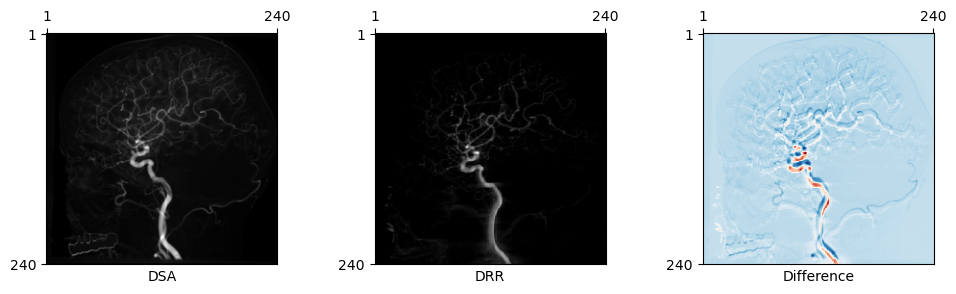
*Get X-ray projections and poses from specimens in the Ljubljana dataset.
Given a specimen ID and projection index, returns the projection and the camera matrix for DiffDRR.*
Type
Default
Details
view
str
“ap” or “lat” or “ap-max” or “lat-max”
filename
Union
None
Path to DeepFluoro h5 file
preprocess
bool
True
Preprocess X-rays
Distribution over camera poses
We sample the three rotational and three translational parameters of \(\mathfrak{se}(3)\) from independent normal distributions defined with sufficient variance to capture wide perturbations from the isocenter.
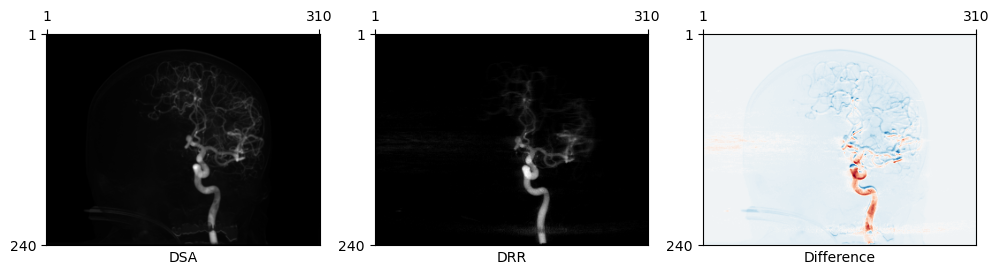
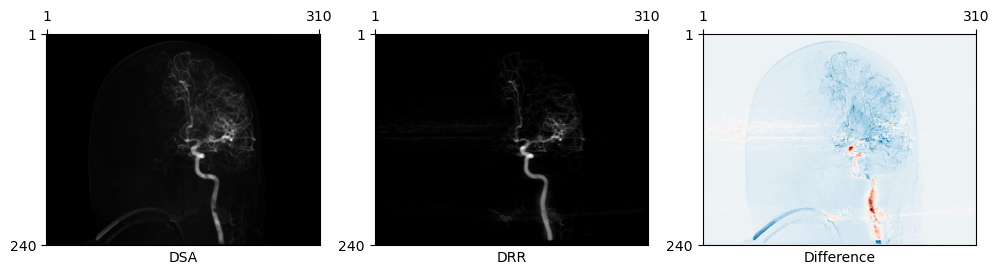
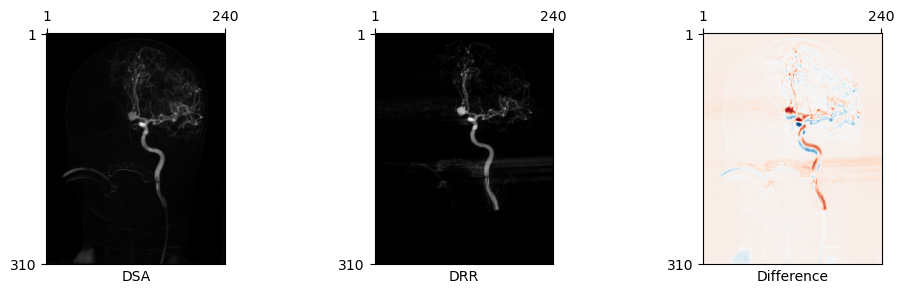
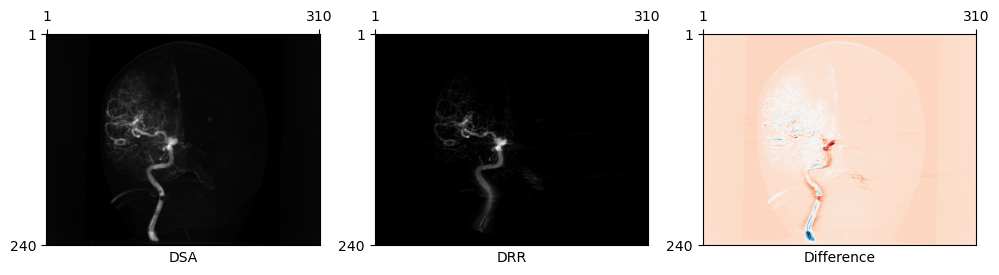
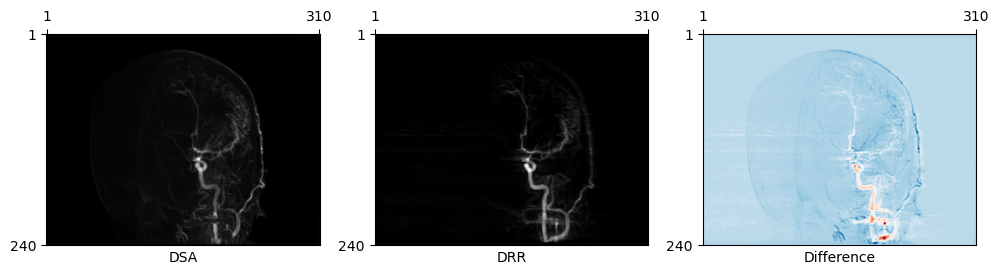
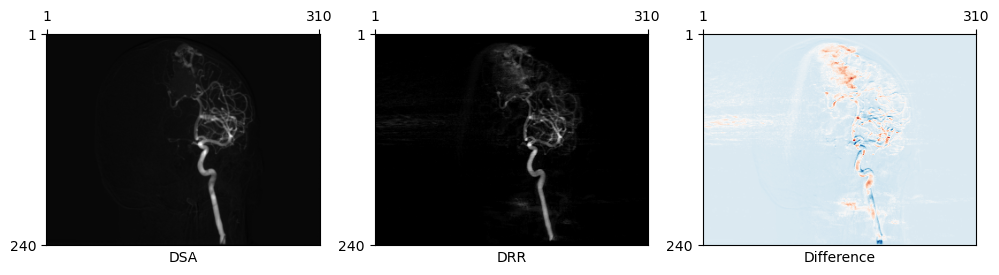
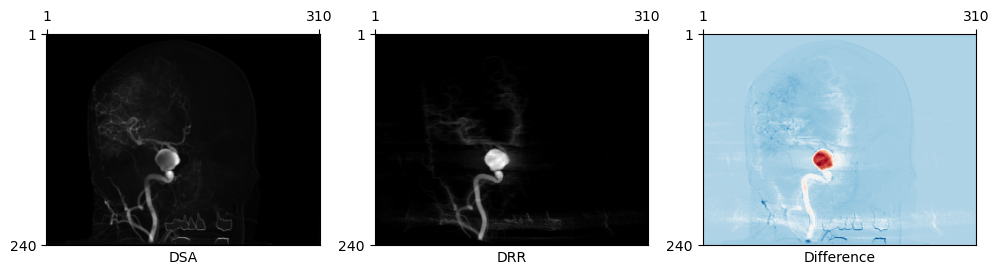
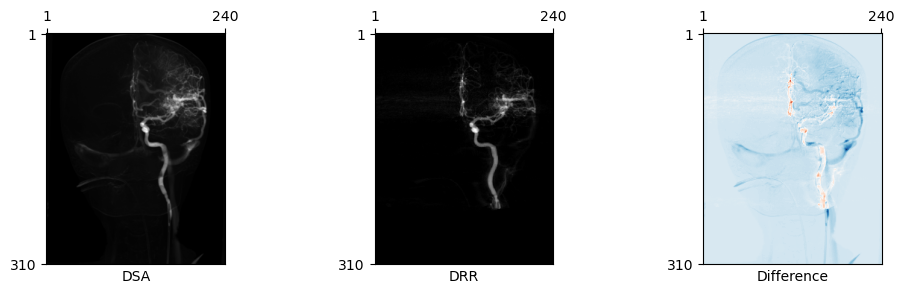
The LjubljanaDataset class also contains a method for evaluating the registration error for a predicted pose. Digital fiducial markers were placed along the centerlines of the vessels. Projecting them with predicted pose parameters can be used to measure their distance from the true fiducials.